[VIP第1年] 指数:3
[VIP第1年] 指数:3
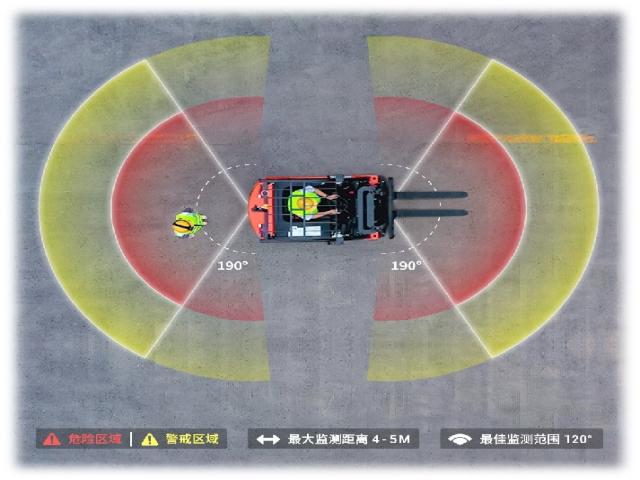
在ROS中,处理底盘的运动安全性以防止碰撞和损坏通常依赖于底盘控制器和导航系统的协同工作。首先,ROS Navigation Stack中的避障模块负责监测机器人周围的障碍物,并通过局部路径规划器生成安全的运动轨迹,以确保机器人能够避开障碍物。其次,底盘控制器通常会集成速度和加速度限制,以确保机器人的运动在安全范围内,不会超过其物理能力或导致损坏。此外,机器人可以装备各种传感器,如激光雷达、超声波传感器或摄像头,用于实时感知环境,以增强避障和碰撞检测的能力。通过在导航和底盘控制中使用保护性策略和紧急停止机制,可以确保在出现意外情况时及时停止机器人的运动,以防止碰撞和损坏。综合利用这些ROS功能,机器人能够在动态环境中安全运动,自主避开障碍物,从而实现高度的运动安全性。智能汽车开发框架,为什么大家选择ros呢?海淀区自动驾驶ros执行标准

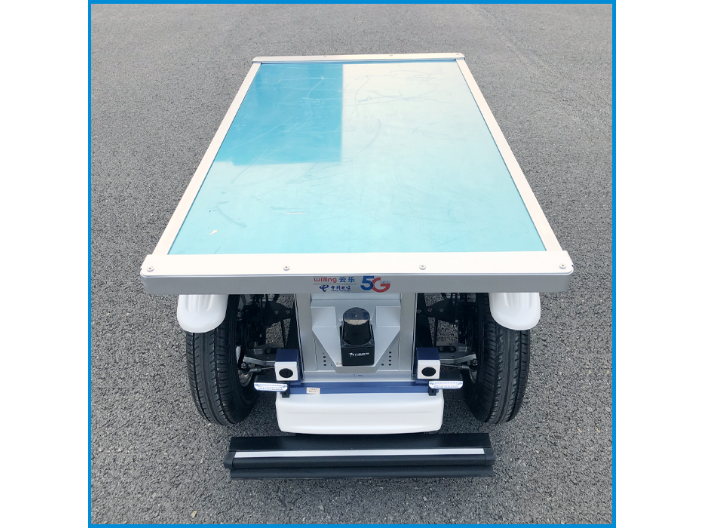
云乐智能车小蜜蜂线控底盘(NWD02)是小蚂蚁线控底盘(NWD01)基础上设计的短轴版线控底盘,因小蜜蜂和小蚂蚁一样属于大自然界**为勤劳的动物之一,故命名为小蜜蜂。它采用了轻量化、模块化、智能化的设计理念的低速无人车开发平台,具有强大载荷能力、稳定操控性能的它有较广的应用领域。阿克曼转向系统和后轮轮毂电机的搭配使得它能够在各类典型路面灵活运动。立体相机、激光雷达、GPS、IMU、机械手等设备可选择加装至底盘作为扩展应用,可被应用到无人巡检、科研、物流等领域。苏州阿克曼ros哪家便宜ROS提供了一套工具和库,用于处理机器人的感知、控制、导航和通信等任务。

在ROS中进行机器人的远程操作和监控可以通过以下步骤实现:首先,确保机器人和远程计算机连接到相同的网络,并具备ROS环境。然后,在机器人上运行ROS主要节点(roscore)以启用ROS通信。在远程计算机上,设置ROS_MASTER_URI环境变量,将其指向机器人的ROS主要节点地址,以建立通信连接。使用ROS工具(如SSH、ROS SSH连接器等)来远程登录到机器人上,以执行命令和程序。通过ROS的远程通信机制(如ROS话题、服务、参数服务器等),你可以发送控制命令、接收传感器数据、执行监控和诊断任务,以实现机器人的远程操作和监控。这种方法使你能够实时远程管理和监控机器人,适用于各种应用,包括远程维护、故障诊断、远程操作、远程巡检等。确保网络安全性和通信稳定性对于远程操作和监控至关重要,因此需要采取适当的网络和安全措施。
ROS(机器人操作系统)与机器人之间有密切的关系,可以看作是机器人开发和控制的关键工具。ROS是一个开源的软件框架,旨在帮助机器人开发者构建、部署和管理各种类型的机器人应用程序。它提供了通信机制、硬件抽象、模块化设计和丰富的工具,使开发者能够轻松处理机器人的感知、控制、导航、仿真和多机器人协作等各个方面。ROS的节点和通信机制允许机器人系统中的不同组件以模块化和松耦合的方式协同工作,使机器人能够感知其环境、做出决策并执行任务。因此,ROS为机器人技术的开发和应用提供了强大的工具和资源,推动了机器人技术的创新和发展,使机器人能够在各种领域,如工业、服务、医疗、农业、自动驾驶等中发挥重要作用。总之,ROS是机器人与机器人技术之间的纽带,为机器人的智能控制和应用提供了关键的支持。ROS提供了一套强大的工具,用于可视化和调试机器人应用程序,以帮助开发人员快速定位和解决问题。

在ROS中,处理底盘的电源管理和电池状态监测是关键,以确保机器人的连续运行。首先,需要与底盘硬件集成电池电量监测系统,通常通过ROS节点获取电池电量信息。然后,开发ROS节点或使用现有的电源管理工具,以监测电池状态并实时更新电池电量信息。通过发布电池状态的ROS话题,其他节点可以订阅并获取电池电量信息,以根据电池状态进行运动规划和决策。在底盘运动控制中,需要考虑电池电量,以避免过度放电和确保机器人能够安全返回充电站。通过电池状态监测,机器人可以自主决策何时返回充电、充电多长时间,以保持连续运行和任务完成。综合这些功能,ROS提供了灵活的电源管理和电池状态监测解决方案,确保机器人在各种应用中能够可靠地运行。通用Ros系统无人车线控底盘厂家。苏州阿克曼ros哪家便宜
Ros系统中ros1和ros2之间的区别。海淀区自动驾驶ros执行标准
在ROS中,TF库是一个用于执行坐标变换的强大工具,用于处理机器人系统中不同坐标系之间的数据转换。首先,你需要在ROS节点中引入TF库,然后创建一个TF听取对象。接着,通过听取对象,你可以执行坐标变换,将数据从一个坐标系转换到另一个坐标系。你需要指定目标坐标系和源坐标系,并提供时间信息以确保数据在正确的时刻进行变换。一旦完成坐标变换,你可以使用变换后的数据来执行机器人系统中的各种任务,如感知、控制、导航等。TF库提供了一个灵活且高效的方式来管理坐标变换,使得在复杂机器人系统中实现坐标变换变得更加容易和可靠。无论是进行视觉SLAM、运动规划还是传感器融合,TF库都是ROS中不可或缺的组成部分海淀区自动驾驶ros执行标准
文章来源地址: http://aqfh.huanbaojgsb.chanpin818.com/znjt/qtznjtsb/deta_24052652.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。