[VIP第1年] 指数:3
[VIP第1年] 指数:3
促进校企合作、产教融合|云乐线控底盘联合推出教育系列。产品近年来,全球人工智能教育领域较发达的国家和地区都逐渐将人工智能人才的培养规划到了国家的顶层战略之中。如何把握全球人工智能教育发展态势,找准突破口和主攻方向,培养大批具有创新能力和合作精神的人工智能高质量人才,是教育的使命所在也是我国人工智能产业不断发展的根本动力。
当前我国人工智能人才教育供需关系:首先,人才有效供给不足,无法满足市场细分需求。第二,传统的人才培养模式不能应对市场对人才的质量需求。第三,高校人才供给与市场需求出现结构性矛盾。第四,毕业生就业意向与人工智能岗位需求错位。第五,人工智能类企业难以招到博士类人才。云乐积极促进校企合作、产教融合校企合作、产教融合既能增强职业教育适应性,又能增强职业教育活力。促进校企合作、产教融合,要求企业深度参与职业教育规划,推动构建适应产业集群发展需求的职业教育专业集群,将产业发展目标转化为人才培养目标。要引导建设一批高水平、专业化的资源共享型职业教育实训基地,发挥示范性产教融合实训基地的辐射率领作用,探索创新实训基地运营模式,努力实现职业教育资源效益比较大化。 ROS的开源性质使得用户可以自由地修改和定制代码,以满足特定的需求和应用场景。四川智能网联ros机器人

在ROS中,参数服务器是一个用于存储和共享配置参数的有用工具。要使用参数服务器,首先,你可以在ROS节点中使用客户端库(如rospy或roscpp)或者通过命令行工具(rosparam)来设置参数,将其存储在参数服务器中。这些参数可以是整数、浮点数、字符串等,用于配置和调整节点的行为。然后,你可以在其他节点中通过相同的方式或命令行工具来获取这些参数的值,以便在系统中使用。这样,你可以在不同的节点之间轻松共享参数,从而实现全局配置和参数化调整。通过参数服务器,你可以更容易地管理和维护节点的配置参数,使系统更具可配置性和灵活性。此外,你可以使用参数服务器的命名空间功能,将参数组织成分组,以更好地组织和管理大量参数。这有助于提高ROS系统的可维护性和可扩展性,适应不同的应用场景和配置需求。福州Apolloros哪家便宜ROS(机器人操作系统)是一个开源的软件框架,用于构建机器人应用程序。

ROS(机器人操作系统)主要用途是提供一个开源的、灵活的框架,用于开发、部署和管理各种类型的机器人应用程序。ROS旨在解决机器人软件开发中的复杂性和困难,为机器人工程师和研究人员提供了一个强大的工具集,以简化机器人系统的开发过程。ROS的主要用途包括:多机器人系统:ROS支持多机器人系统的开发,允许多个机器人协同工作,共同完成任务,如搜索和救援、探险等。机器人教育和研究:ROS在教育和学术研究中得到广泛应用,为学生和研究人员提供了一个学习和实验的平台,以探索机器人技术的各个方面。工业和服务机器人:ROS也在工业自动化和服务机器人领域中得到普遍使用,用于控制和管理各种类型的机器人,如自动导航车辆、机械臂和无人机。总之,ROS的主要用途是为机器人开发提供一个开放、模块化和强大的框架,以简化复杂的机器人软件开发任务,加速创新,推动机器人技术的发展,并为各种应用领域提供可靠的机器人解决方案。ROS的灵活性和丰富的社区支持使其成为了机器人领域的标准工具之一。
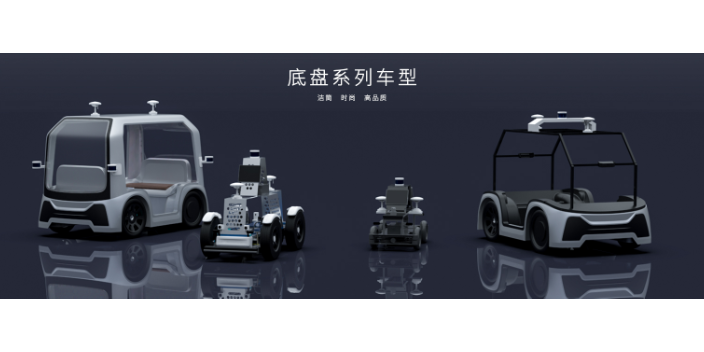
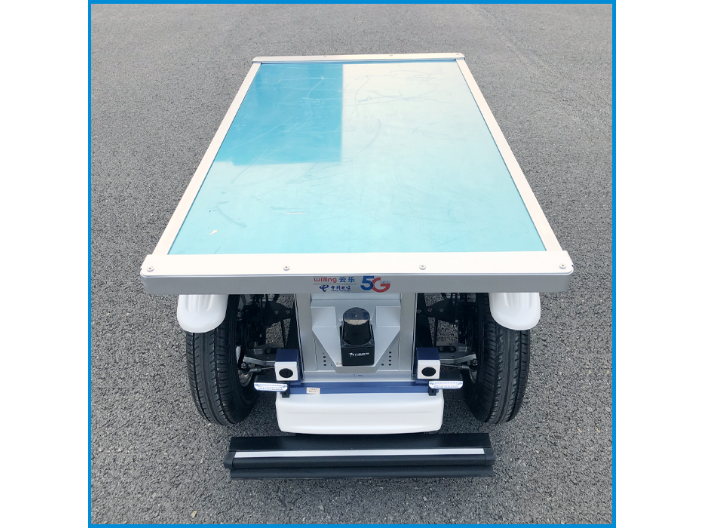
云乐线控底盘|无人驾驶教育领域科研应用亮点。云乐智能车的线控底盘一直深受无人驾驶教育领域的客户们欢迎,小编整理了一下云乐智能线控底盘在科研项目领域的应用亮点,供大家参考!希望云乐智能车可以更深入地支持无人驾驶教育,推动行业快速发展!首先就是有六个规格尺寸可供选择,小型、中型、中大型均有。搭配无人驾驶套件,可满足不同场景需求。再者就是每款底盘规范接口+开放CAN协议+技术支持,提供智能驾驶套件和云计算服务,出厂前13项性能测试和耐久试验,提供场景试验成功案例和试验场+提供场景应用成功案例。其次提供场景三维重建、仿真平台构建、云平台构建的支持,提供实验成果展示、演示内容支持,欢迎您前来咨询,为您提供专业的无人驾驶技术解决方案。Ros系统无人驾驶小车批发价格是多少?

在ROS(机器人操作系统)中,机器人的感知和控制是通过节点(Nodes)和ROS话题(Topics)的方式进行处理的。感知方面,传感器节点负责读取机器人的传感器数据,如激光雷达、相机和惯性测量单元(IMU)等,然后将这些数据发布到ROS话题上。其他节点可以订阅这些话题,以获取感知数据并进行进一步的处理,例如环境地图构建、障碍物检测和目标跟踪等。控制方面,控制节点可以订阅感知节点发布的数据,计算机器人的运动控制命令,并发布到相应的ROS话题上。运动控制器节点可以订阅这些命令,控制机器人的运动,例如驱动底盘、控制关节或执行其他执行器动作。这种分布式计算和通信模型允许机器人系统中的不同组件单独运行,以实现高度模块化的感知和控制系统,从而使机器人能够感知其环境并根据需要进行响应,实现各种任务和功能,如自主导航、避障、目标跟踪和自动化操作。ROS的通信机制(发布/订阅模型)和节点化的设计使其成为处理机器人感知和控制的强大工具,使机器人系统更加灵活、可扩展和易于开发和维护。ROS 节点之间的连接是直接的,Master只负责提供查询信息,就像一个DNS 服务器。朝阳区智能网联ros前景
ROS系统的运行逻辑是依据什么?四川智能网联ros机器人
在ROS中进行机器人的远程操作和监控可以通过以下步骤实现:首先,确保机器人和远程计算机连接到相同的网络,并具备ROS环境。然后,在机器人上运行ROS主要节点(roscore)以启用ROS通信。在远程计算机上,设置ROS_MASTER_URI环境变量,将其指向机器人的ROS主要节点地址,以建立通信连接。使用ROS工具(如SSH、ROS SSH连接器等)来远程登录到机器人上,以执行命令和程序。通过ROS的远程通信机制(如ROS话题、服务、参数服务器等),你可以发送控制命令、接收传感器数据、执行监控和诊断任务,以实现机器人的远程操作和监控。这种方法使你能够实时远程管理和监控机器人,适用于各种应用,包括远程维护、故障诊断、远程操作、远程巡检等。确保网络安全性和通信稳定性对于远程操作和监控至关重要,因此需要采取适当的网络和安全措施。四川智能网联ros机器人
文章来源地址: http://aqfh.huanbaojgsb.chanpin818.com/znjt/qtznjtsb/deta_23427979.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。