[VIP第1年] 指数:3
[VIP第1年] 指数:3
ROS(机器人操作系统)的主要优势在于其开放源代码、灵活性、强大的社区支持和模块化设计,为机器人开发者提供了一种强大的工具,用于简化机器人软件开发的复杂性和提高开发效率。首先,ROS是开放源代码的,这意味着任何人都可以使用、修改和分享它,从而推动了机器人技术的开放创新。其次,ROS提供了丰富的库和工具,包括导航、感知、控制、仿真和仿真等,这些工具加速了机器人应用程序的开发,减少了重复工作。第三,ROS支持分布式计算,允许开发人员将机器人系统划分为多个单个的节点,这些节点可以在不同的计算机上运行,通过通信协议进行交互,从而实现高度可扩展性和灵活性。此外,ROS提供了强大的通信机制,允许节点之间通过话题和服务进行消息传递,实现松耦合的通信,使机器人系统更容易构建和维护。ROS拥有一个庞大的全球社区,社区成员提供了丰富的文档、教程、示例代码和支持,这使得机器人开发者可以轻松获得帮助和资源,加速了机器人技术的发展和应用。综上所述,ROS作为一个开源、灵活和强大的机器人开发框架,具有众多优势,使其成为机器人领域的SHOUXUAN工具,促进了机器人技术的创新和进步。ROS也可称为是Route Operation System,意为"软件路由器"。天津四轮驱动四轮转向ros应用范围

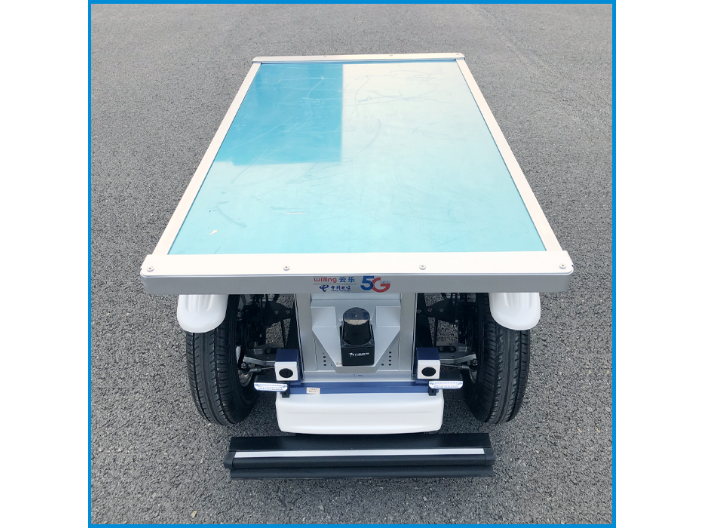
云乐智能车小蜜蜂线控底盘(NWD02)是小蚂蚁线控底盘(NWD01)基础上设计的短轴版线控底盘,因小蜜蜂和小蚂蚁一样属于大自然界**为勤劳的动物之一,故命名为小蜜蜂。它采用了轻量化、模块化、智能化的设计理念的低速无人车开发平台,具有强大载荷能力、稳定操控性能的它有较广的应用领域。阿克曼转向系统和后轮轮毂电机的搭配使得它能够在各类典型路面灵活运动。立体相机、激光雷达、GPS、IMU、机械手等设备可选择加装至底盘作为扩展应用,可被应用到无人巡检、科研、物流等领域。天津四轮驱动四轮转向ros应用范围ROS(机器人操作系统)是一个开源的软件框架,用于构建机器人应用程序。

在ROS中模拟机器人的运动和传感器数据通常涉及使用仿真工具和包,如Gazebo和ROS机器人模型(URDF),以创建虚拟机器人模型并模拟其运动行为和感知数据。首先,你需要在Gazebo中创建一个仿真环境,导入你的机器人模型和其物理属性,以模拟真实世界中的运动。然后,你可以使用ROS控制器或自定义节点来控制机器人的运动,例如设置关节角度或速度命令。同时,你可以模拟传感器数据,如激光雷达、摄像头、编码器等,通过ROS话题或服务来发布虚拟传感器数据。这些数据可以用于测试和验证导航、避障、SLAM、路径规划和其他机器人算法,从而在仿真环境中开发和调试机器人控制和感知系统,以减少硬件实验的成本和风险。通过结合Gazebo和ROS,你可以创建一个强大的仿真环境,以模拟和测试各种机器人平台和应用,为机器人开发提供了高度可控和可重复的实验场景。
要在ROS中编写自定义底盘驱动程序,以与特定型号的线控底盘进行通信,首先需要了解底盘的通信协议和接口规范。然后,创建一个ROS节点,该节点通过底盘通信接口与底盘硬件通信,解析并发送控制命令(例如速度和转向)以控制底盘运动。在ROS节点中,您需要编写底盘驱动程序的代码,将ROS的底盘控制消息与底盘通信协议进行转换和映射。同时,创建ROS话题或服务,以允许其他ROS节点发送控制命令和接收底盘状态信息。确保在编写驱动程序时,考虑到底盘的运动学特性和硬件接口,以确保通信的准确性和稳定性。通过ROS启动文件(launch file)启动自定义底盘驱动程序节点,使其与ROS系统集成,从而实现与特定型号的线控底盘的通信和控制。通过这些步骤,您可以在ROS中创建自定义底盘驱动程序,以满足特定底盘硬件的需求,并与ROS的生态系统进行集成。ROS的模块化架构使得开发人员可以轻松地集成各种硬件和软件组件,以实现复杂的机器人功能。

ROS(机器人操作系统)与机器人之间有密切的关系,可以看作是机器人开发和控制的关键工具。ROS是一个开源的软件框架,旨在帮助机器人开发者构建、部署和管理各种类型的机器人应用程序。它提供了通信机制、硬件抽象、模块化设计和丰富的工具,使开发者能够轻松处理机器人的感知、控制、导航、仿真和多机器人协作等各个方面。ROS的节点和通信机制允许机器人系统中的不同组件以模块化和松耦合的方式协同工作,使机器人能够感知其环境、做出决策并执行任务。因此,ROS为机器人技术的开发和应用提供了强大的工具和资源,推动了机器人技术的创新和发展,使机器人能够在各种领域,如工业、服务、医疗、农业、自动驾驶等中发挥重要作用。总之,ROS是机器人与机器人技术之间的纽带,为机器人的智能控制和应用提供了关键的支持。Ros系统之线控底盘如何改装?江西麦克纳姆轮ros厂家直销
Ros系统和移动机器人之间有什么关系?天津四轮驱动四轮转向ros应用范围
在ROS中执行SLAM(Simultaneous Localization and Mapping)地图构建需要以下步骤:首先,确保机器人搭载适当的传感器(通常是激光雷达)来感知周围环境。然后,选择一个适用于你的硬件和需求的SLAM算法,如GMapping或Cartographer,安装并配置相应的ROS软件包。接着,创建一个ROS工作空间并将机器人描述模型(通常使用URDF)和SLAM配置文件放入工作空间。在ROS参数服务器中配置传感器参数和SLAM参数。接下来,使用机器人的驱动程序节点获取传感器数据,将其传递给SLAM节点进行处理。运行SLAM节点时,提供初始位姿估计或使用自动初始化。机器人通过移动和传感器数据收集的同时,执行定位和地图构建。保存生成的地图并使用可视化工具如rviz查看地图,完成SLAM地图构建。这使机器人能够在未知环境中进行自主导航和定位,是构建自主移动机器人或智能机器人应用的关键步骤。天津四轮驱动四轮转向ros应用范围
文章来源地址: http://aqfh.huanbaojgsb.chanpin818.com/znjt/qtznjtsb/deta_23376998.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。