[VIP第1年] 指数:3
[VIP第1年] 指数:3
ROS的主要目标是为机器人研究和开发提供代码复用的支持。ROS是一个分布式的进程(即“节点”)框架,这些进程被封装在易于被分享和发布的程序包和功能包中。ROS也支持一种类似于代码储存库的联合系统,这个系统也可以实现工程的协作及发布。可以使一个工程的开发和实现从文件系统到用户接口完全单独决策(不受ROS限制)。同时,所有的工程都可以被ROS的基础工具整合在一起。ROS在某些程度上和其他常见的机器人架构有些相似之处,如:Player、Orocos、CARMEN、Orca和MicrosoftRoboticsStudio。对于简单的无机械手的移动平台来说,Player是非常不错的选择。ROS则不同,它被设计为适用于有机械臂和运动传感器的移动平台(倾角激光、云台、机械臂传感器)。与Player相比,ROS更有利于分布式计算环境。当然,Player提供了较多的硬件驱动程序,ROS则在高层架构上提供了更多的算法应用(如集成OpenCV的视觉算法)。Ros系统发展需要面临的重要问题有哪些?福建带编码器ros哪里有

ROS(机器人操作系统)被广泛应用于多个领域,其中包括学术研究、工业自动化、服务机器人、自动驾驶、农业、航空航天、教育和医疗机器人等。在学术研究中,ROS为机器人领域的创新提供了强大的开发工具,研究人员可以使用ROS来探索自主导航、感知、机器学习和多机器人协同等领域。在工业自动化中,ROS被用于控制和管理工业机器人和自动导航车辆,提高了生产效率和灵活度。服务机器人在餐饮、医疗和零售等领域中得到广泛应用,用于执行任务如点餐送餐、患者监测、导购和清洁。自动驾驶领域使用ROS来开发自动驾驶汽车的感知、控制和路径规划系统,以实现智能交通和汽车自动化。在农业领域,ROS用于开发农业机器人,用于种植、收获、施肥和监测,提高了农业生产效率。苏州四轮驱动四轮转向ros商家ROS的开源性质使得用户可以自由地修改和定制代码,以满足特定的需求和应用场景。

ROS被用于航空航天领域,测试无人机、卫星和航天器的自主控制和导航系统。教育机构使用ROS来教授机器人技术,培养学生和工程师的机器人开发技能。医疗机器人用于手术、康复、诊断和患者监测,ROS用于开发和控制这些医疗机器人。在探险和勘探领域,ROS被用于开发地下、水下和极地环境中的机器人,执行任务如勘探、地图制作和资源挖掘。总之,ROS的灵活性和强大功能使其成为各种机器人应用程序的主要开发平台,为机器人技术的创新和应用提供了关键支持。
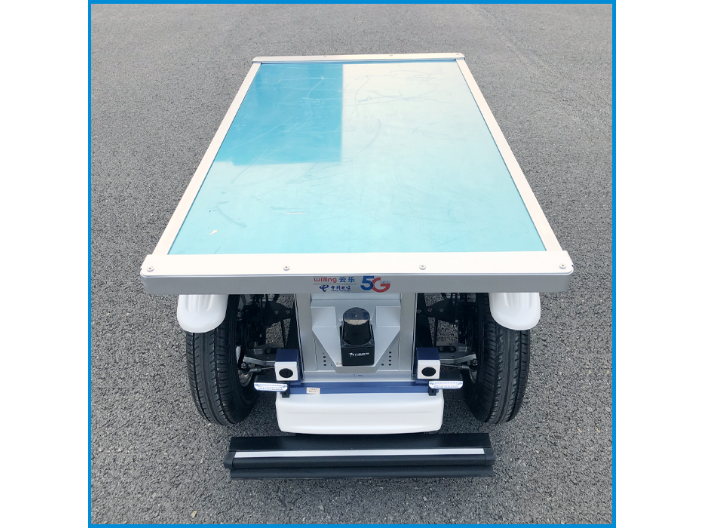
要使用ROS创建底盘驱动节点以控制线控底盘的运动,首先需要确保底盘硬件与ROS兼容,并连接传感器(如编码器)以提供位置和速度反馈。然后,编写一个ROS节点,该节点负责订阅速度和转向命令的话题,并将这些命令转换为底盘驱动所需的电机控制信号。通过ROS话题通信,将这些电机控制信号发送给底盘驱动器。在节点中实现速度和转向命令的转换和控制逻辑,确保底盘响应控制指令以实现所需的运动。通过ROS启动文件(launch file)来启动底盘驱动节点,以控制线控底盘的运动。这样,您可以使用ROS轻松创建一个底盘驱动节点,以实现线控底盘的运动控制,适应各种机器人应用,如自动巡航车或无人地面车辆。ROS系统无人小车如何使用?

在ROS中,控制机器人的运动通常涉及使用机器人控制框架(例如ros_control)来控制机器人的关节或执行器,以实现轮式机器人或机械臂等不同类型机器人的运动。首先,你需要创建一个ROS节点或使用现有的控制节点,然后订阅传感器数据(例如激光雷达、编码器、IMU等)来感知机器人的当前状态。接着,你可以使用运动控制算法(如PID控制器、路径规划器、运动学逆解等)来生成运动控制命令。这些命令将被发送到机器人的控制器,用于调整机器人的关节或执行器位置和速度,从而实现所需的运动。你可以使用ROS话题、服务或行为来与运动控制节点进行通信,以启动、停止或修改机器人的运动任务。ROS提供了丰富的工具和库,使机器人运动控制更容易实现,允许开发者集中精力解决机器人导航、路径规划、避障和运动控制等复杂问题,从而实现各种应用,包括自主移动机器人、机械臂、无人机等。ROS(Robot Operating System)是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。福建带编码器ros哪里有
ROS的社区非常活跃,有大量的开源软件包和教程可供使用和学习。福建带编码器ros哪里有
在ROS中,处理底盘的电源管理和电池状态监测是关键,以确保机器人的连续运行。首先,需要与底盘硬件集成电池电量监测系统,通常通过ROS节点获取电池电量信息。然后,开发ROS节点或使用现有的电源管理工具,以监测电池状态并实时更新电池电量信息。通过发布电池状态的ROS话题,其他节点可以订阅并获取电池电量信息,以根据电池状态进行运动规划和决策。在底盘运动控制中,需要考虑电池电量,以避免过度放电和确保机器人能够安全返回充电站。通过电池状态监测,机器人可以自主决策何时返回充电、充电多长时间,以保持连续运行和任务完成。综合这些功能,ROS提供了灵活的电源管理和电池状态监测解决方案,确保机器人在各种应用中能够可靠地运行。福建带编码器ros哪里有
文章来源地址: http://aqfh.huanbaojgsb.chanpin818.com/znjt/qtznjtsb/deta_23179938.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。