[VIP第1年] 指数:3
[VIP第1年] 指数:3
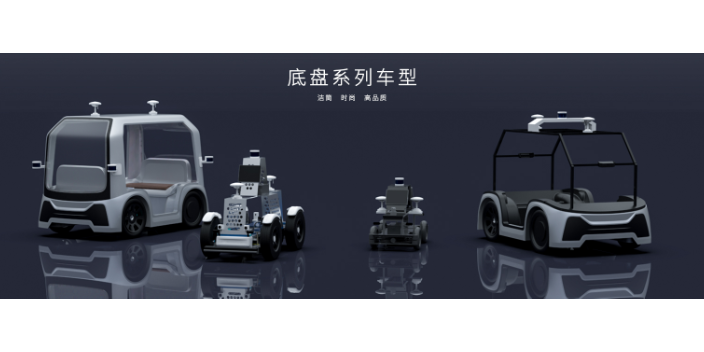
云乐线控底盘|无人驾驶教育领域科研应用亮点。云乐智能车的线控底盘一直深受无人驾驶教育领域的客户们欢迎,小编整理了一下云乐智能线控底盘在科研项目领域的应用亮点,供大家参考!希望云乐智能车可以更深入地支持无人驾驶教育,推动行业快速发展!首先就是有六个规格尺寸可供选择,小型、中型、中大型均有。搭配无人驾驶套件,可满足不同场景需求。再者就是每款底盘规范接口+开放CAN协议+技术支持,提供智能驾驶套件和云计算服务,出厂前13项性能测试和耐久试验,提供场景试验成功案例和试验场+提供场景应用成功案例。其次提供场景三维重建、仿真平台构建、云平台构建的支持,提供实验成果展示、演示内容支持,欢迎您前来咨询,为您提供专业的无人驾驶技术解决方案。ROS还支持代码库的联合系统,使得协作亦能被分发。海淀区无人巡逻车ros应用范围

首先是日益增长的服务机器人公司的需求。在接下来的十年里,我们将会看到首辆自动驾驶汽车成功上路。届时将会出现一批我们现在无法设想的机器人和应用程序。正如WillowGarage较早成员之一TullyFoote在2007年年末承诺的那样,在未来,“你将能够使用任何开源软件,只需结合你的商业模式做一些小小的改动,就能开启你的创业之旅”。ROS社区的发展将前所未有地使有创意的设计师和创业者们站在巨人的肩膀上。其次,工业市场上的应用也将越来越多。然而目前,对于ROS仍然有限的工作能力和是否应该放弃传统的成功商业模式,工业机器人制造商们仍持有一定理性的顾虑。不过,与此同时,ROS正在以相对简单的方式来灵活设计解决方案,以此拓展整个行业的边界。武汉安保巡逻ros供应商ROS(Robot Operating System)是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。

ROS(机器人操作系统)被广泛应用于多个领域,其中包括学术研究、工业自动化、服务机器人、自动驾驶、农业、航空航天、教育和医疗机器人等。在学术研究中,ROS为机器人领域的创新提供了强大的开发工具,研究人员可以使用ROS来探索自主导航、感知、机器学习和多机器人协同等领域。在工业自动化中,ROS被用于控制和管理工业机器人和自动导航车辆,提高了生产效率和灵活度。服务机器人在餐饮、医疗和零售等领域中得到广泛应用,用于执行任务如点餐送餐、患者监测、导购和清洁。自动驾驶领域使用ROS来开发自动驾驶汽车的感知、控制和路径规划系统,以实现智能交通和汽车自动化。在农业领域,ROS用于开发农业机器人,用于种植、收获、施肥和监测,提高了农业生产效率。
ROS(机器人操作系统)主要用途是提供一个开源的、灵活的框架,用于开发、部署和管理各种类型的机器人应用程序。ROS旨在解决机器人软件开发中的复杂性和困难,为机器人工程师和研究人员提供了一个强大的工具集,以简化机器人系统的开发过程。ROS的主要用途包括:机器人控制和导航:ROS允许开发人员轻松编写机器人的控制算法,包括运动控制、路径规划和避障。它还提供了强大的导航库,支持自主导航和地图构建,使机器人能够在未知环境中移动。感知和环境感知:ROS提供了各种用于处理传感器数据的工具和库,包括激光雷达、相机、IMU等。这使得开发人员可以轻松地集成和处理传感器数据,实现环境感知和对象识别。模拟和仿真:ROS支持机器人仿真,开发人员可以在虚拟环境中测试和验证机器人的行为和算法,从而节省时间和资源。Ros系统小车的发展前景怎么样?

在ROS中,处理底盘的电源管理和电池状态监测是关键,以确保机器人的连续运行。首先,需要与底盘硬件集成电池电量监测系统,通常通过ROS节点获取电池电量信息。然后,开发ROS节点或使用现有的电源管理工具,以监测电池状态并实时更新电池电量信息。通过发布电池状态的ROS话题,其他节点可以订阅并获取电池电量信息,以根据电池状态进行运动规划和决策。在底盘运动控制中,需要考虑电池电量,以避免过度放电和确保机器人能够安全返回充电站。通过电池状态监测,机器人可以自主决策何时返回充电、充电多长时间,以保持连续运行和任务完成。综合这些功能,ROS提供了灵活的电源管理和电池状态监测解决方案,确保机器人在各种应用中能够可靠地运行。ROS 节点之间的连接是直接的,Master只负责提供查询信息,就像一个DNS 服务器。武汉安保巡逻ros供应商
Ros系统发展需要面临的重要问题有哪些?海淀区无人巡逻车ros应用范围
要在ROS中编写自定义底盘驱动程序,以与特定型号的线控底盘进行通信,首先需要了解底盘的通信协议和接口规范。然后,创建一个ROS节点,该节点通过底盘通信接口与底盘硬件通信,解析并发送控制命令(例如速度和转向)以控制底盘运动。在ROS节点中,您需要编写底盘驱动程序的代码,将ROS的底盘控制消息与底盘通信协议进行转换和映射。同时,创建ROS话题或服务,以允许其他ROS节点发送控制命令和接收底盘状态信息。确保在编写驱动程序时,考虑到底盘的运动学特性和硬件接口,以确保通信的准确性和稳定性。通过ROS启动文件(launch file)启动自定义底盘驱动程序节点,使其与ROS系统集成,从而实现与特定型号的线控底盘的通信和控制。通过这些步骤,您可以在ROS中创建自定义底盘驱动程序,以满足特定底盘硬件的需求,并与ROS的生态系统进行集成。海淀区无人巡逻车ros应用范围
文章来源地址: http://aqfh.huanbaojgsb.chanpin818.com/znjt/qtznjtsb/deta_22707088.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。